
Build Your Playground
Design a path for the CoCube robot to reach the destination based on CoTags.
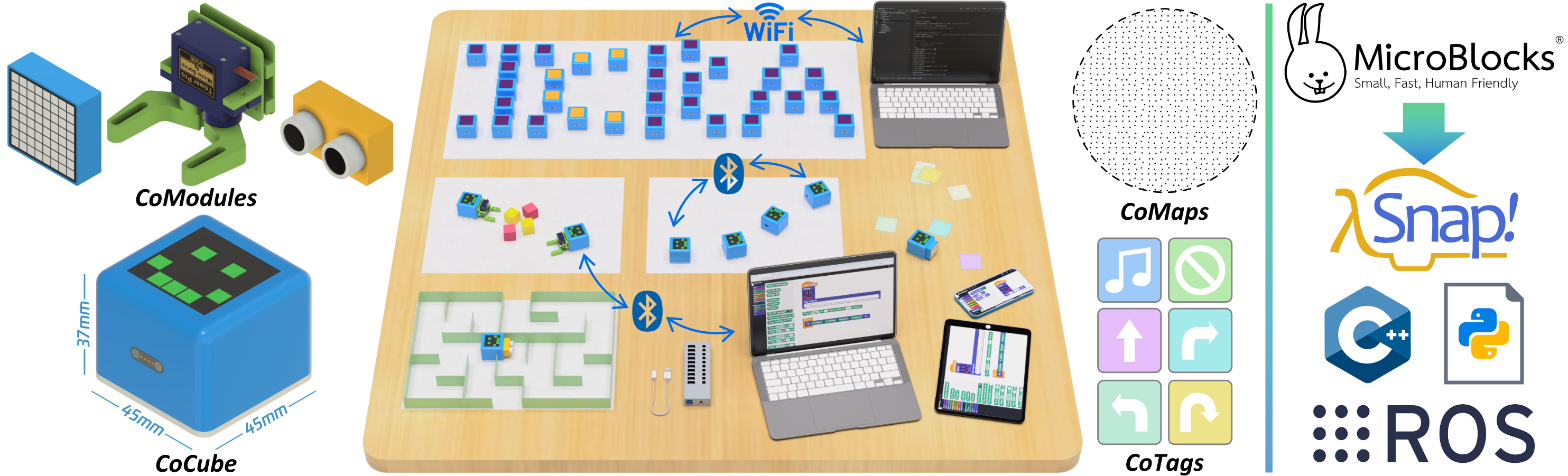
We present CoCube, a tabletop modular robotics platform designed for robotics education and multi-robot algorithm research. CoCube is characterized by its low cost, low floors, high ceilings and wide walls, offering flexibility and broad applicability across various use cases. The platform comprises four key components: CoCube robots, which integrate wireless communication, movement and interaction; CoModules, which provide versatile external functionality; CoMaps, which enable high-precision localization via microdot patterns on regular printed paper; and CoTags for interaction. CoCube operates on MicroBlocks, a blocks programming language for physical computing inspired by Scratch, a widely-used coding language with a simple visual interface that makes programming accessible to young learners. It offers users both flexibility and ease of use, with advanced API support for more complex applications. This paper details the design of the CoCube platform and demonstrates its potential in both educational and research contexts.
Design a path for the CoCube robot to reach the destination based on CoTags.
Each robot follows the one in front while maintaining a set distance. The first robot can be controlled manually or via remote control.
Each robot swaps positions with the robot at its diagonal. We use the RVO2 algorithm to implement speed avoidance for robots.
Each robot is equipped with a servo gripper module, and teams of two robots are tasked with sorting 3D-printed cylinders into designated areas.
Based on the Hungarian algorithm, 32 robots are arranged to form the letters "ICRA 2025."
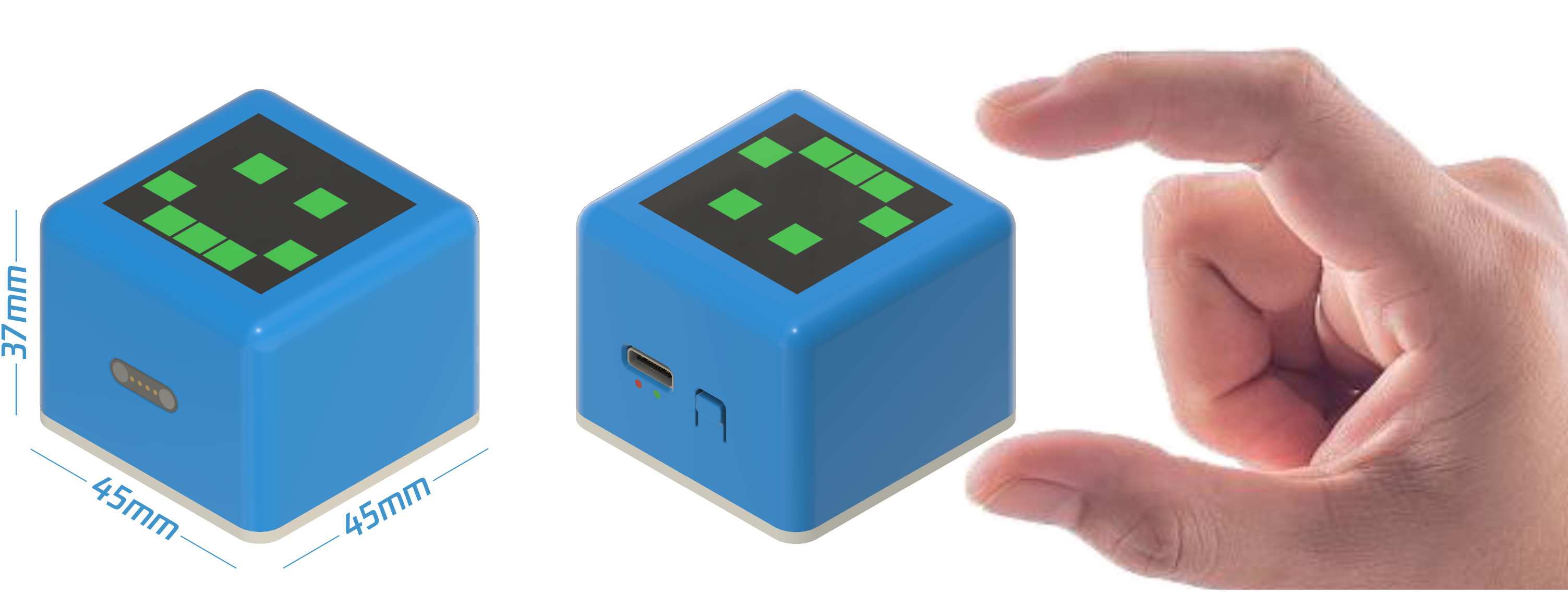
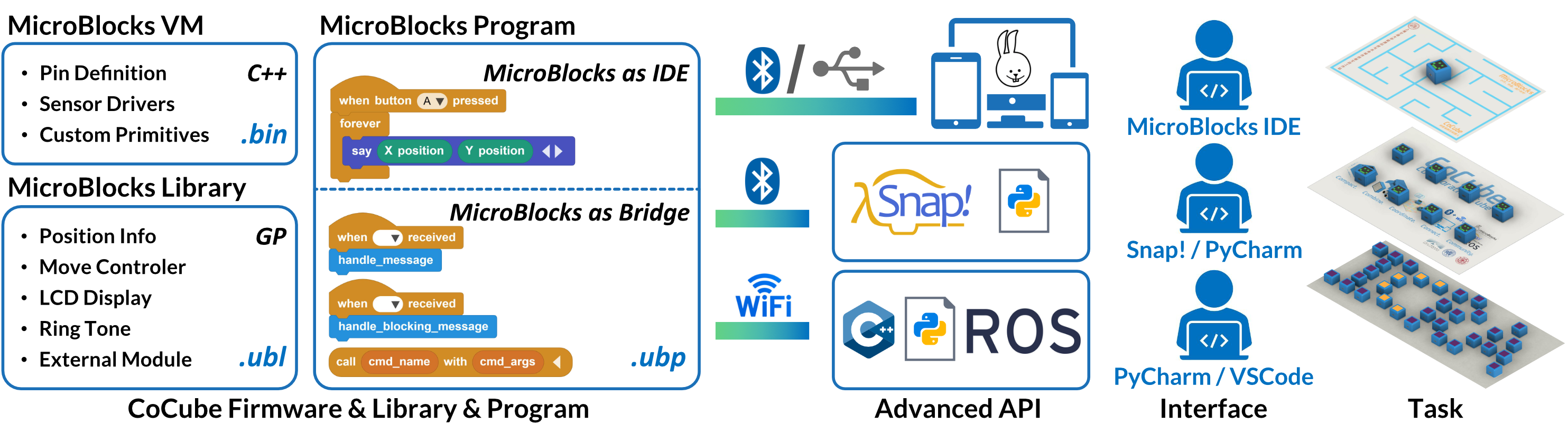
CoCube Robot is an ultra-compact cube-shaped robot that integrates features like screen interaction, wireless communication, and motion sensing, ensuring independent operation while maintaining small size and low cost.
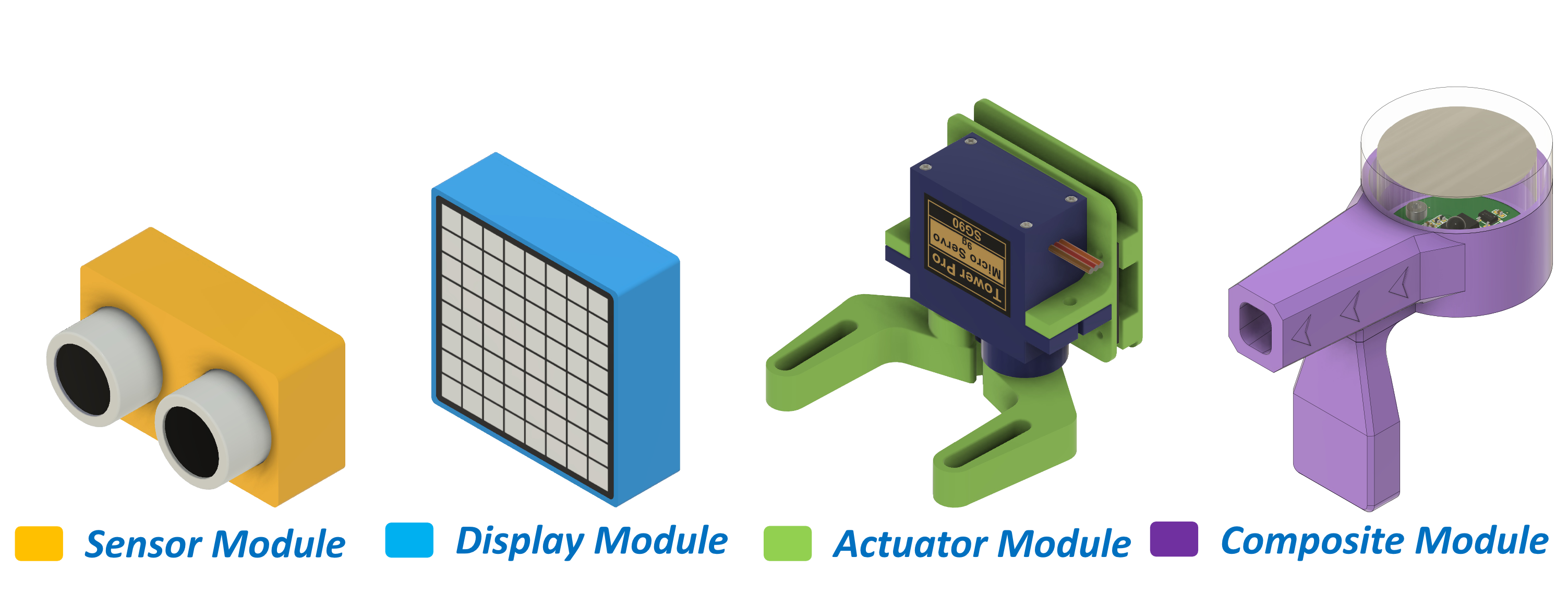
CoModules are a series of magnetic attachment modules designed to expand the functionality of the CoCube robot. By utilizing pin multiplexing, CoModules support almost any type of sensor, actuator, display or composite external module, and encourage user participation in module design.
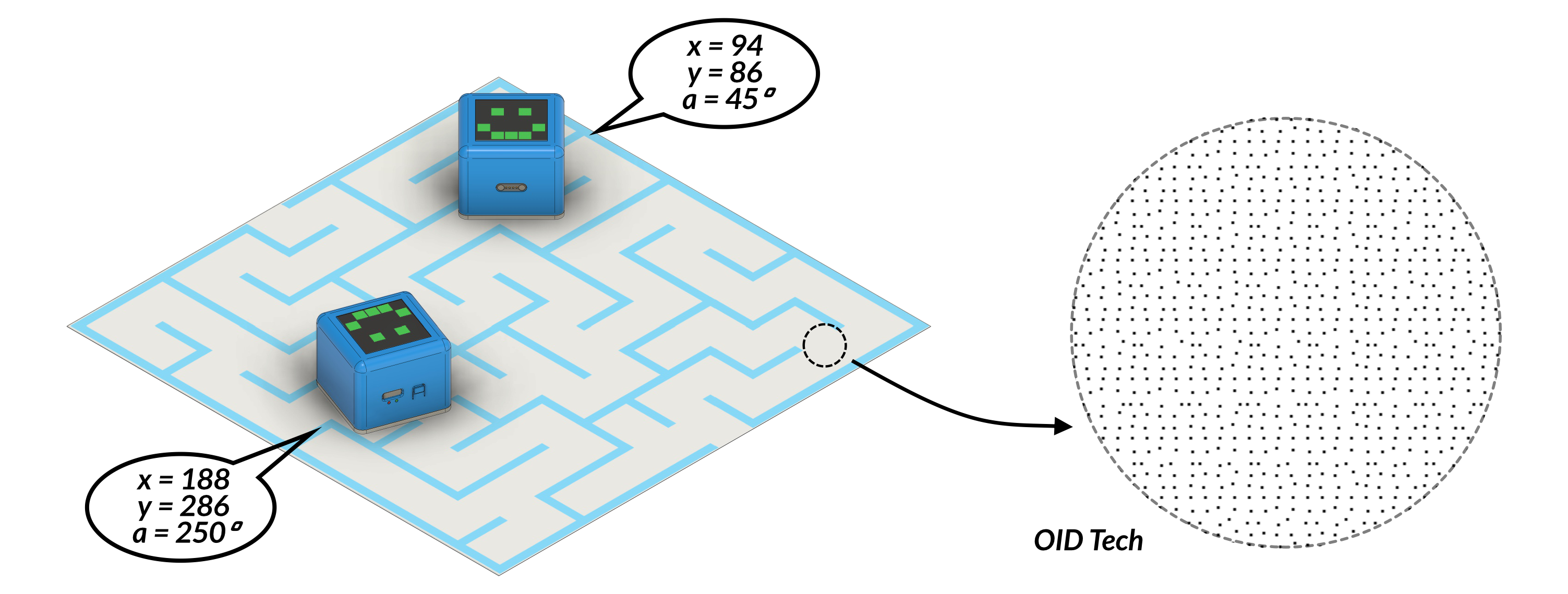
CoMaps utilize Optical Identification (OID) technology, with coded micro-dots printed on regular paper, to provide a high-precision, easily deployable localization solution for CoCube robots. Each A3-sized CoMap can be combined to create larger maps, enabling scalable localization.
For software architecture, CoCube aims to offer an user-friendly programming experience while maintaining flexibility and scalability to support its modular hardware. The system uses MicroBlocks for firmware development and block libraries, with communication interfaces for advanced APIs to enable more complex tasks.
We organized a two-day workshop for over 10 young students in the Changning District of Shanghai and
our team achieved
first place.
2024 China-US Youth Maker Competition
Shanghai Division successfully concluded
Photos of the event posted on
Twitter
Congratulations from
MicroBlocks














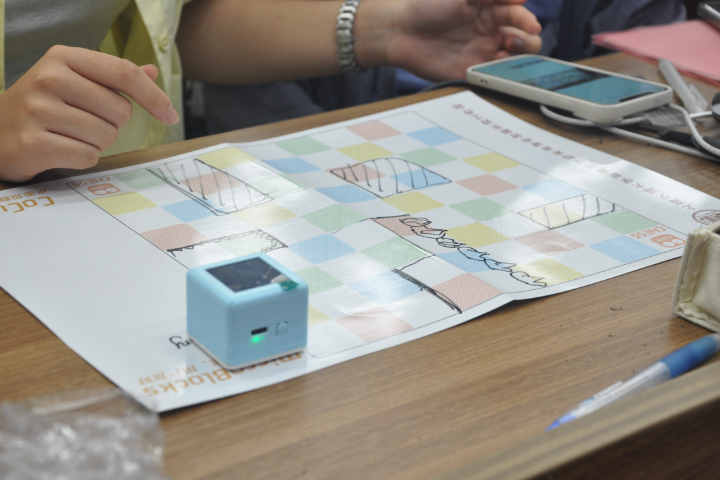




We conducted a 3-hour CoCube experience course for 120 high school freshmen. Each pair of students used a CoCube, collaborated to design and complete their own demos and recorded videos to share their projects with other students. In this large-scale course, CoCube performed exceptionally well.
The CoCube team was invited to participate in the event. With its unique design concept and
outstanding functionality, it became a highlight of the event, earning widespread appreciation and
recognition from attending educational institutions, teachers and students.
The CoCube robot takes you on a journey to
explore the limitless possibilities of creativity.


This work was sponsored by Science and Technology Commission of Shanghai Municipality (Project No.24DZ2307500) and supported by the Shanghai AI Laboratory (Project No.2022ZD0160102).
We extend our heartfelt thanks to everyone on the MicroBlocks team for their substantial support, including Kathy Giori, Turgut Güneysu, José García, Peter Mathijssen, Jens Mönig, Tom Lauwers, Jadga Hügle, Amon Millner and others.
We are especially grateful to Dr. Ruilei Zhang for his valuable guidance.
We are also particularly grateful to the organizing committee of the China-U.S. Youth Maker Competition Shanghai Division, especially Mr. Bin Li, for facilitating the involvement of children in the CoCube public welfare courses.
Furthermore, we would like to acknowledge the friends who contributed to the development of CoCube and its course services, including: Jiaxin Li, Sena Shao, Yutao Jin, Haonan Zhao, Yan Ma, Jianan Li(male), Jianan Li(female), Lei Tang, Russell Owen, Shaoteng Wu, Hanwei Zhou, Shang Shi, Meitao Huang, Lvmanshan Ye, Xuehan Ding, Kaiyi Huang, Zhixuan He, DeWei Wang, Siqi Jiao, etc.
Coming Soon……
Shuai Liang, sliang23@m.fudan.edu.cn